

数字化船坞系统
数字化船坞是实现精益造船的重要手段之一。韩国和国内某些大型船厂(大连重工、江南长兴等)已全面建立数字化船坞,通过充分利用现有的软件系统IN-CHECK、IN-ANALY、GeoYard数字化基准测量控制网管理软件、Adjust3D三维网平差软件,以及全站仪等设备,实现总段船坞快速搭载、半船位移、模拟搭载等,大幅提高吊车使用效率、缩短船坞周期,从而实现提高经济效益和生产效率。
一、数字化船坞概述
数字化船坞是实现精益造船的重要手段之一。韩国和国内某些大型船厂(大连重工、江南长兴等)已全面建立数字化船坞,通过充分利用现有的软件系统IN-CHECK、IN-ANALY、GeoYard数字化基准测量控制网管理软件、Adjust3D三维网平差软件,以及全站仪等设备,实现总段船坞快速搭载、半船位移、模拟搭载等,大幅提高吊车使用效率、缩短船坞周期,从而实现提高经济效益和生产效率。
二、数字化船坞原理
数字化船坞的原理是以建立在船坞周围的基准标靶,记录表示原来船坞中的船体中心线、肋位线和高度基准线,形成统一的船坞坐标系统。数字化船坞通过在船坞四周树立数字化旋转标靶,在船坞区域形成三维空间坐标系。船舶进坞后,按照首个基准分段在该三维空间坐标系内的位置,进行定位和坐标确认;根据坞壁四周的数字化旋转标靶所形成的三维空间坐标系,进行搭载分段定位作业。通过电脑预先进行传统船坞搭载定位作业模拟,取消船坞格子线,实现快速分段定位、无余量搭载、一次定位,以达到节省工时、提高吊车使用效率、缩短船坞周期的目的。
三、数字化船坞建造流程
3.1 数字化船坞标靶布设
根据船坞大小来确定控制网标靶的数量及放置距离;数字化标靶树立在船坞四周,可旋转360°;标靶每50m测量精度在2mm以内;安装时要确保数字化标靶垂直度。
3.2 坞内地样线开设
参考精度管理图及地样线精度表,进行地样线(中心线、大接头线、肋位线、纵桁线、辅助中心线)划设,严格加放精度设计加放量。其中,地样线中心线直线度精度在±1mm以内;类位间距精度在±3mm以内;纵桁半宽偏差在±3mm以内;大接头加放后实际与理论偏差在±2mm以内;基高点位偏差在2mm以内。
3.3 Des文件坐标建立
1.数据文件采集
测量船坞地样线(中心线、大接头线、0号肋位线、基高点),利用全站仪测量两基准点后再依次采集各旋转标靶的点坐标。(注意:基准点的选取需考虑到以后在矫正标靶时基准点要在可视范围以内)
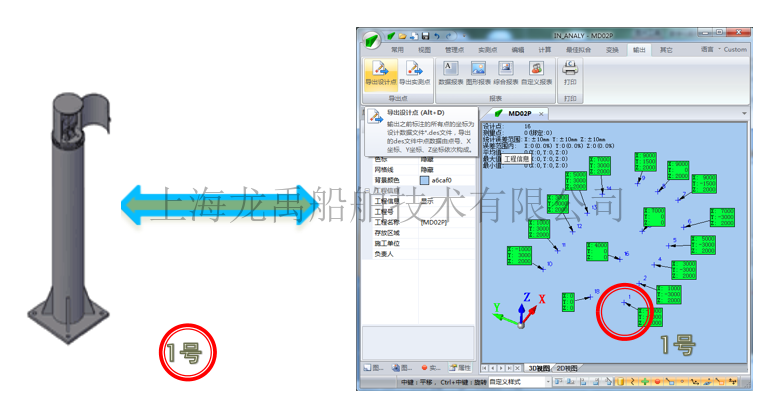
2.建立Des原始文件
把采集好的各旋转标靶的点坐标导入电脑分析软件IN-ANALY中,把基准点一点移动到其在船体坐标系中的三维位置(X、Y、Z),即可建立与船体坐标系相一致的船坞坐标系,并对各旋转标靶编号(其编号要与坞边旋转标靶号码一致),再输出保存即可建立Des.原始文件。
3.4 检验Des文件
使用二点或三点连接测量,将Des导入全站仪对数字化标靶进行检验,转换时实际测量点要与理论点相匹配,显示偏差值要在±3mm以内方能使用。从第3点测量开始对船坞四周所有标靶进行检测,坐标值后显示实际测量点坐标与理论点坐标的偏差值最大不超过3mm。
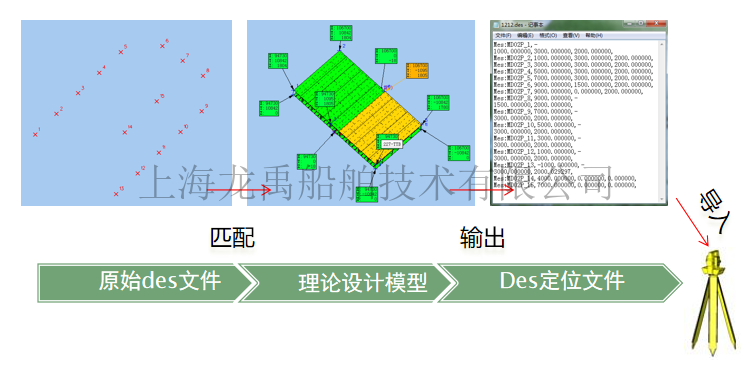
3.5 搭载定位分段Des文件建立
在分段定位之前要建立好与之相匹配的Des定位文件,首先导入Des原始文件,再调出定位分段模型建立定位所需的主要管理点,最后输出保存即可建立Des.定位文件。搭载定位Des文件导入全站仪,对数字化船坞二点或三点连接测量,对分段进行搭载。
四、数字化船坞应用
4.1船舶船坞建造规划
根据数字化船坞的原理,数字化船坞三维空间坐标系,可以迅速规划船舶建造区域(例如:电脑上就可预见船坞可以建造哪些类型的船舶,船舶如何摆放如何布局等)和布置船舶船坞搭载基准,同时可高精度、高效率完成对外(船东、船检)报验。
4.2船坞分段快速搭载应用
采用二点连接测量,导入控制网原始文件,转换时实际测量点要与理论点相匹配,显示偏差值要在±3mm以内方能使用。转换完成后,从第3点测量开始,即可在坐标值后显示实际测量点坐标与理论点坐标的偏差值。(定位分段重要管理点上贴好反射片)
4.3在半船起浮位移定位时,使用数字化船坞更加方便。
半船起浮位移前现在船体上黏贴好2个反射光靶,确定其在船体中的三维坐标(X、Y、Z);位移完成后用此2点的船体三维坐标确定坞边旋转标靶的船体坐标,建立与船体一致的三维坐标系。
4.4数字化船坞在模拟搭载的应用
模拟搭载过程中利用数字化控制网对已搭载段进行数据采集及模拟预拼,实现总段无余量搭载、一次性定位。
4.5船体主尺度测量与报验
传统主尺度测量是以原先船坞地样线为基准,挂线锤和拉长尺,通过计算得出,操作繁琐且精度低。数字化船坞是根据原先精密旋转标靶建立的三维空间坐标系为基准,通过全站仪测量和变换到船体三维空间坐标系,对应测量两柱间长,总长,型宽,型深的位置,准确、简单地采集数据,从而得出我们需要的数据,可以高精度、高效率地完成对外报验。
4.6船舶轴舵系精控和对外交中报验
同样的根据数字化船坞原理和构架,三维空间坐标系,可以精确、迅速轴舵系基准点的布置,以及对外交中报验,报验工艺简单化,精确化等。
4.7水线水尺,载重线,载重标志等划线和检测
同样的根据数字化船坞原理和构架,三维空间坐标系,使用全站仪测量通过基准旋转标靶,进入水线水尺测量模式,可以精确、迅速地找出水线水尺位置,勾点划线。在水线水尺施工完毕后,以相同方法对外报验。
五、数字化船坞后期运营管理与维护
5.1数字化基准点管理维护
控制网基准点分为明点、暗点两种类型,针对明点设置高出地面的保护装置并配备警示标志,针对暗点设计高精度复原机制便于点位的拆卸与安装。部分损坏的基准点的需要进行更换,更换后的基准点,重新进行复测;保留使用的基准点,需进行精度校验,满足精度要求后可继续使用。
5.2稳定性观测
鉴于场地由空载至满载过程中、以及随时间推移会发生沉降变形,进而对精度测量控制网基准点数据产生影响。精度测量控制网建设之初,对船坞进行沉降监测,用于船坞稳定性分析与精度测量控制网数据修正方案设计。
稳定性观测采用单站极坐标法,分别用全站仪和激光跟踪仪两种方法实现测量,进行首期形变数据的确立。
5.3船坞数据库可靠性检测与复查
基于数字化船坞的使用方案均加入了数据可靠性自查机制,便于在使用过程中及时探测基准点的点位变化,确保分段定位搭载的顺利实施。在运营一段时期,尤其当部分基准点被破坏后,可选择对数字化船坞数据库进行复测,以检查其精度与可靠性。
六、未来发展方向
数字化船坞升级为数字化三维测量系统,船体、机装、舾装共用此网络,将现有的各类测量仪器和施工设备,譬如:激光跟踪仪、激光水准仪、扫描仪、全站仪、三维调整小车、液压同步顶升装置等共享这个三维网络数据,到达实施任意模块在任意位置的一体化快速测量、合拢、定位、搭载,成为大数据平台的智能化造船重要工艺手段之一,同时数字化三维测量系统是未来的信息化造船的重要基石之一,是未来数据库分析的重要数据源之一。
公司地址:上海市浦东新区毕升路299号11栋201室
公司电话:021-33830252
公司传真:021-33830253
公司邮编:201204
公司邮箱:service@shipac.com.cn