

TSMS实时移位三维监测系统
TSMS实时移位三维监测系统由测量机器人型全站仪、以太网通信设备、跟踪监测测量软件和测量附件组成。其主要功能为:可实现1~6台(现支持)及以上(需定制)测量机器人型全站仪在600m内实现指令及数据传输;支持模型载入、跟踪测量、数据记录、位置和姿态实时展现,报告可编辑可输出。
一、产品与应用概述
TSMS实时移位三维监测系统由测量机器人型全站仪、以太网通信设备、跟踪监测测量软件和测量附件组成。其主要功能为:可实现1~6台(现支持)及以上(需定制)测量机器人型全站仪在600m内实现指令及数据传输;支持模型载入、跟踪测量、数据记录、位置和姿态实时展现,报告可编辑可输出。
TSMS实时移位三维监测系统由测量机器人型全站仪、以太网通信设备、跟踪监测测量软件和测量工装附件组成。
该系统通过下面几种组合应用,可以实现:
1、一台测量机器人结合In-Check测量软件
可以实现快速自动指向测量点的功能,省去大量人工照准被测点的麻烦,节省人力。
2、一台测量机器人结合船坞标靶
可实现自动多测回的测量,结合网平差软件,实现船坞控制网的自动测量和误差分析,节省人力,提升数据专业说服力。
3、一台测量机器人结合TSMS跟踪测量软件
跟踪单个点获得运动轨迹;如对大型总段移位过程中,运动状态下船体位置,进行跟踪测量,确定其移位轨迹,保障移位进度和预测移位趋势。
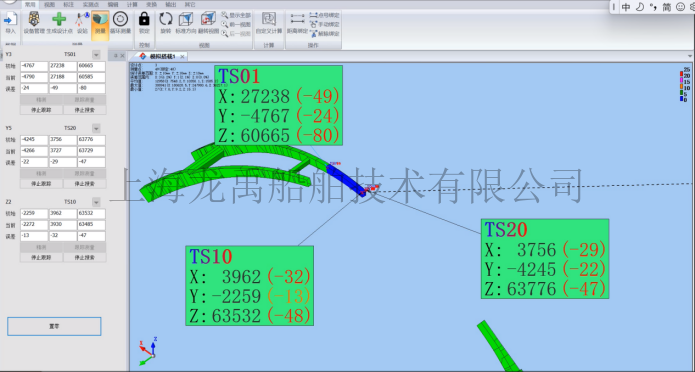
4、一台测量机器人结合TSMS跟踪测量软件
对小范围精调状态下(落敦精调)的多个点进行循环自动监测,计算该三个点所构架的分段的实时位置和实时姿态,可实现搭载定位的精确调整,适用于液压三维调整机等小范围吊装的精确定位。
5、TSMS跟踪测量软件配套多台测量机器人
可实现动态测量全过程的实时跟踪,实现运动状态下多个点所构架的半船、环段、大型装备、大型结构件的实时位姿监测。在距离5~600米情况下,以0.5~3秒刷新一次的频率,实时获得当前大型装备滑移、大型结构件提升吊装、大型船舶半船起浮移位或环段合拢的监测数据。
二、应用案例
2.1 大型装备滑移装船监测
2021年7月,三峡如东海上换流站工程包含基础桩、导管架及上部模块三部分组成,上部换流站长89米、宽84米、高44米,重2.2万吨,建造总装位置距离码头前沿约213米。为保证安全滑移装船,对换流站整体姿态进行实时监测,根据监测数据对船体压载舱进行调整以保证换流站整体处于最佳安全状态。
采用3台测量机器人配合TSMS跟踪测量软件,实现定时定点多测回跟踪测量,实时出图,以视觉偏移的方式形成呈现目标位置和姿态,即时调整船舶压载和滑移速度,保证滑移效率和安全。



2.2 大型钢结构件提升吊装监测
陕西东庄水利枢纽泾河大桥,是国家重大水利工程。东庄水利枢纽工程是陕西库容最大、坝高最高、单体项目投资额最大的水利工程,是全国唯一在建的具有调水调沙功能的大型水利工程。
泾河大桥全长284米,是中承式空间Y型钢箱拱桥,在平面和立面均呈现Y型结构,桥梁结构设计新颖,在国内尚属首例。泾河大桥的设计采用单双结合,主、副拱联合受力模式,空间三维曲线拱,施工难度极大。
建设方采用3台测量机器人配合TSMS跟踪测量系统对耐候钢高空三维定位技术进行研讨实践,为泾河大桥吊装跟踪监测和焊接定位提供有力技术保障。


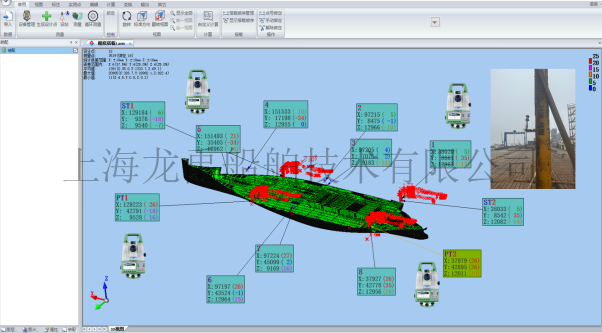
2.3 大型船舶半船起浮移位落墩定位监测、大型环段合拢位姿监测
半船起浮移位落墩定位应用,已建造好半船从异地拖到厂内船坞,半船长约200m,监测进坞实时过程,指导现场精确落墩。该方法同样适用于大型环段合拢位姿监测。
在船体上布设好4个360度棱镜,根据船体基准,现场测量确定其在船体中的三维坐标(X、Y、Z);落墩船坞处确定坞边旋转标靶的船体坐标,建立与船体一致的三维坐标系,四台全站仪现场定向组网,统一坐标系。测量机器人追踪棱镜目标,实时监测位移数据变化,现场指导落墩定位调整。
整个监测过程从进坞至落墩历时6小时,最终落墩精度优于15mm,有效保证移船落墩的精度及效率。


公司地址:上海市浦东新区毕升路299号11栋201室
公司电话:021-33830252
公司传真:021-33830253
公司邮编:201204
公司邮箱:service@shipac.com.cn